







柔性驱动并联机器人

柔性驱动并联机器人
品创科技基于在航空航天领域深耕多年并广泛应用的力位混合控制技术,开发出柔性并联机器人。其末端运动平台利用柔索连接固定平台,通过实时调整索长与拉力,控制平台空间位置和姿态。该机器人采用航空航天级力控技术,具备超大工作空间,兼具高精度与安全性,可应用于工业、科研、教育等领域。
工作空间规划
工作空间规划
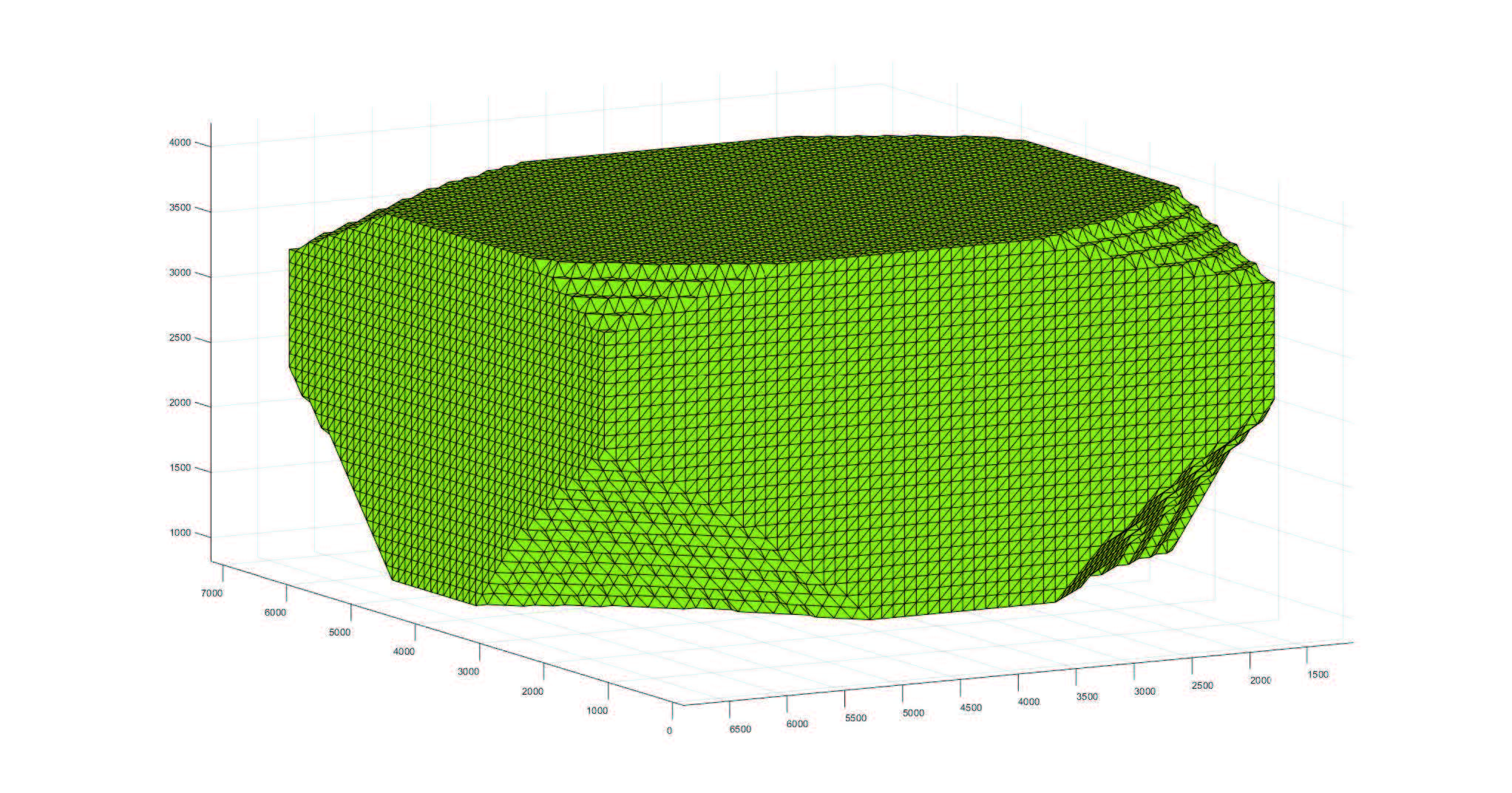
柔性装卸机器人需要工作空间解析,确保在指定范围内,吸盘或抓手可准确到达指定位置。工作空间规划是根据实际场地定制设计的关键技术,品创科技具备深厚的技术积累和实施经验。
智能视觉识别

智能视觉识别
智能视觉识别系统⽤⾼清摄像机和激光雷达,快速捕捉袋装产品的特征 。利⽤⼈⼯智能分析这些特征,基于AI的智能视觉系统,实现毫⽶级定位精度与99.5%识别准确率,指挥柔性装卸机器⼈精准装卸货物 。品创科技在此系统上有多项专利,开发了多款专⽤图像处理产品适配不同⼯作场景 。
高精度伺服卷筒
高精度伺服卷筒
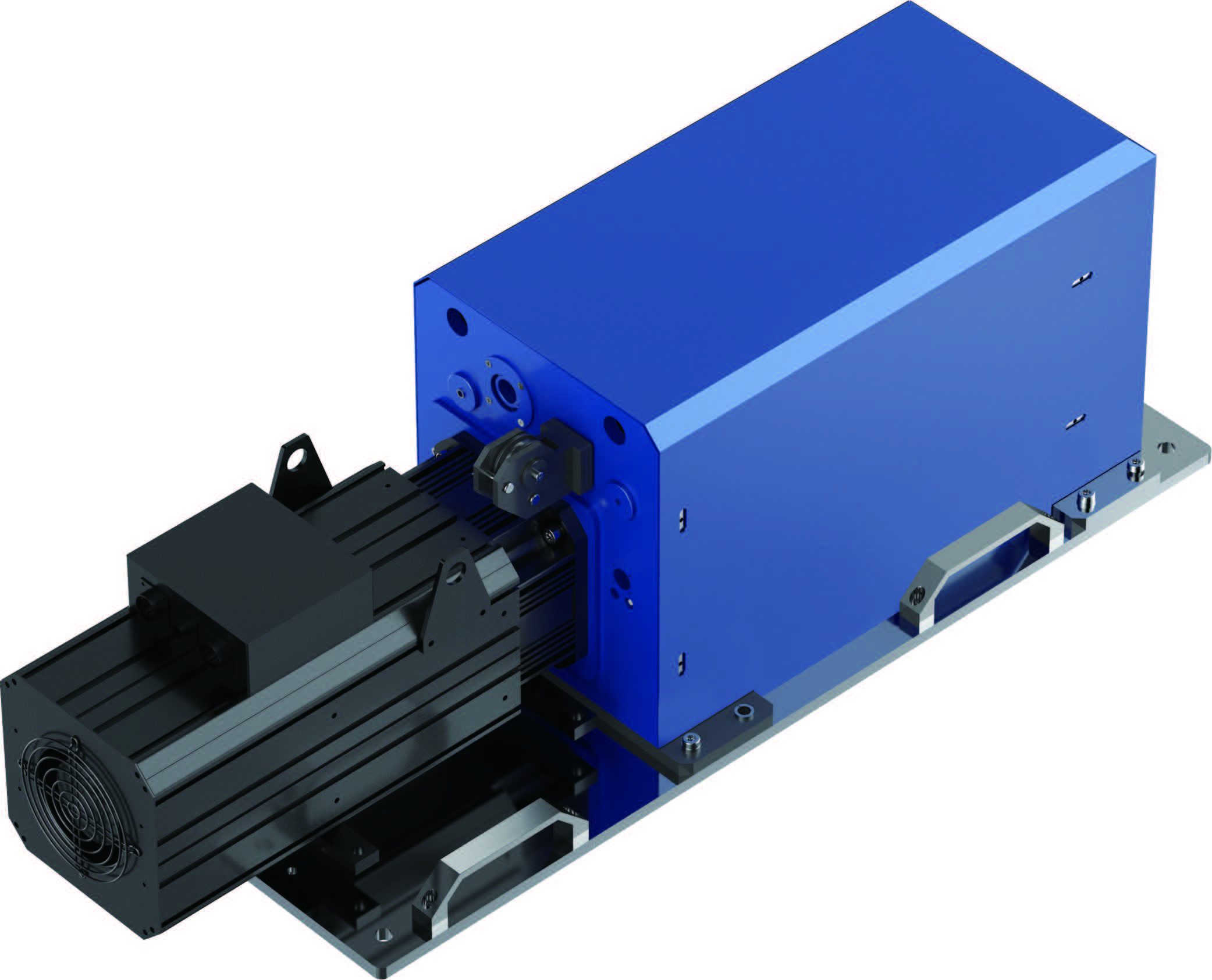
⾼精度伺服卷筒是确保柔性装卸机器⼈能够精准将货物装卸到指定位置的核⼼部件。基于品创科技⾃主研发的精密伺服系统,⾼精度伺服卷筒可实现索⻓和索拉⼒的准确控制。